Hitch-hiking UAVs
A novel system concept, whereby ultra-efficient delivery drones would hitch-hike and wirelessly recharge on London buses.
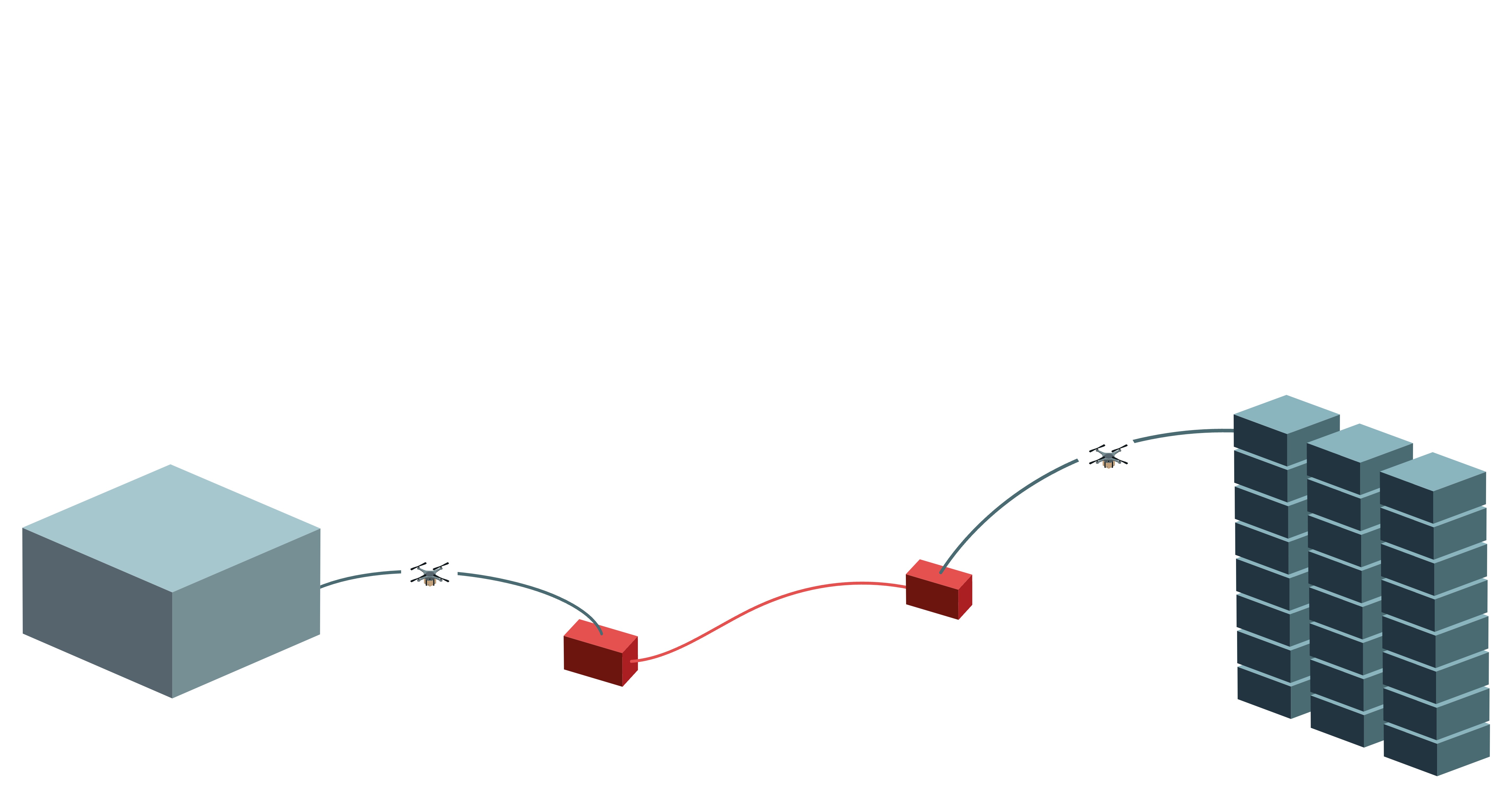
This project explored the concept of delivery drones hitch-hiking on public transport to minimise their energy consumption. A quadcopter was designed and built to demonstrate the integration of an autonomous delivery mechanism with wireless-power-transfer, as shown in the following videos:


Documentation of the flight-controller and Raspberry Pi set-up, along with the UAV server code, can be found in this public Github repo.
This design was additionally used as a basis for a system analysis regarding the energy-efficiency of this concept, which is documented in the accompanying master's thesis and the analysis Github repo.
In the early project stages, a value sensitive design study was conducted to examine the ethical implications of urban delivery UAVs, and the resulting report can be downloaded here.